Ogólne 4-osiowe sterowanie maszyny pomiarowej widzenia Smart Package
Wprowadzenie
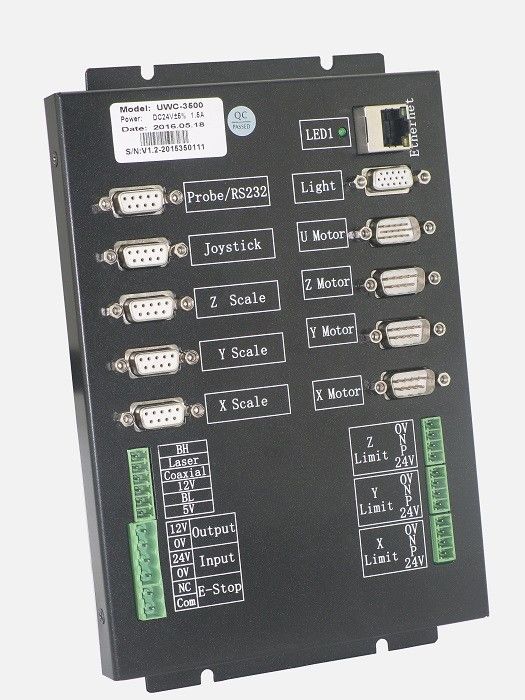
UWC 3500 to ogólny 4-osiowy sterownik pełnej pętli zamkniętej, stosowany w maszynach pomiarowych widzenia i kompozytowych maszynach pomiarowych widzenia lub w automatycznych systemach pomiarowych.Z odwrotem pozycji w układzie śluzowym w skali liniowej lub w koderze silnika, UWC3500 jest w stanie osiągnąć wysoką dokładność.
Charakterystyka:
1Zaawansowana konstrukcja górnej i dolnej maszyny, wysokiej wydajności CPU+FPGA
2Komunikacja: interfejs Ethernet, czas działania pojedynczej funkcji API jest niższy niż 0,45 ms.
3. Tryb sterowania kierunkiem+pulsem, zdolny do sterowania silnikami stopniowymi, servo AC, servo liniowym lub DDM itp.
4. Pełna kontrola ruchu w bliskiej pętli, wysoka dokładność lokalizacji, która jest szybka, dokładna i stabilna. Zaawansowany algorytm kontroli w bliskiej pętli i bardzo niewiele parametrów PID zapewniają łatwe skręcanie dla użytkowników.
5. S typu krzywej prędkości, stosunek przekroju S w procesie opóźnienia może być ustawiony.
6Strategia lokalizacji:
Puls + kierunek otwartej pętli.
Liniowa kontrola śluzowa zwrotnej pozycji skali/kodera, ulepszony algorytm PID+VFF, eliminujący problem zerowego przesunięcia.
7. Tryb ruchu:
Punkt do punktu, tryb JOG, tryb homing, który jest łatwy w obsłudze i elastyczny, interpolacja liniowa 2 lub 3 osi, interpolacja łuku poziomego, sonda dotykowa i tryb joystick.
8Polityka bezpieczeństwa:
Funkcja automatycznej regulacji obracania maszyny, automatyczne ustawianie logiki i kierunku granicznego, parametrów silnika i kierunku linearnego sprzężenia zwrotnego,zapewnienie wyeliminowania błędu ruchu zwrotnego.
Kiedy oś porusza się w pobliżu granicy występuje przyspieszenie w przód, a przed przywróceniem się występuje przymusowe ograniczenie prędkości ruchu.
Oprogramowanie obsługiwane.
9. Funkcja API wykorzystuje enkapsulację skierowaną w stronę obiektu, która zapewnia łatwe programowanie. Większość parametrów jest ustawiana przez oprogramowanie do debugowania.
10Wysoka integracja, wysoka wydajność, stabilna i łatwa produkcja i konserwacja.
11UWC-3500 wykorzystuje technologię produkcji SMT, zapewnia stabilność i niezawodność.
12Z dużą elastycznością UWC3500 pasuje do nie standardowego sprzętu, a także dostosowuje funkcję.
13. UWC3500 obsługuje funkcję aktualizacji oprogramowania internetowego, użytkownicy nie muszą usuwać sterownika z maszyny, łatwo aktualizować i rozszerzać funkcję,skrócić cykl rozwoju i obrotu sprzętu.
14Zewnętrzny moduł UWC348 IO, maksymalnie 26 w 26 na zewnątrz.
15Funkcja porównywania pozycji, która może być precyzyjnie dopasowana, również użytkownicy mogą ustawić zakres dopasowania spustu, wyjście spustu może być podłączone do kamery lub czujnika laserowego.
16Funkcja sterowania źródłem światła stroboflash operacyjny i funkcja uruchomienia pozycji CCD.
17Zawiera potężne oprogramowanie do debugowania, łatwe w obsłudze, łatwe dla użytkowników do obrócenia maszyny.
Parametry
| Pozycja |
Min.
|
Typowe
|
Max, proszę.
|
Jednostka
|
| Czas działania API |
0.425
|
0.43
|
0.45
|
ms
|
| Napięcie mocy wejściowej |
22.5
|
24
|
26
|
VDC
|
| 12V napięcie wyjściowe mocy pomocniczej |
11.76
|
12.05
|
12.24
|
VDC
|
| 12V wyjściowy prąd zasilający |
0
|
2.0
|
2.5
|
A
|
| Wyjściowe napięcie mocy 5V |
5.1
|
5.2
|
5.25
|
VDC
|
| Prąd wyjściowy mocy 5 V |
0
|
1.8
|
2.0
|
A
|
| X/Y/Z Interfejs silnika z możliwością obciążenia 24V |
0
|
3.0
|
4.0
|
A
|
| Częstotliwość impulsu kierunkowego |
-
|
-
|
6.5
|
MHz
|
| Rozdzielczość częstotliwości |
0.006
|
-
|
-
|
Hz
|
| Zakres liczenia w skali liniowej |
- 2147483648
|
-
|
2147483647
|
CNT
|
| Zakres liczenia impulsu kierunkowego |
- 2147483648
|
-
|
2147483647
|
CNT
|
| Poziom regulacji prędkości |
-
|
-
|
1,000,000,000
|
32-bitowy DDS
|
| Wspierana rozdzielczość w skali liniowej |
- 0.01
|
-
|
10000
|
- Tak.
|
| Częstotliwość wyjścia sygnału w skali liniowej |
-
|
-
|
6.5
|
MHz
|
| Ogólne wejście/wyjście sterownika |
-
|
-
|
-
|
Terminal
|
| Interfejs komunikacji RS232 dużych prędkości |
-
|
2
|
-
|
Terminal
|
| Zewnętrzne wejście / wyjście IN (za pomocą jednego interfejsu komunikacyjnego RS232) |
-
|
24/24
|
-
|
Terminal
|
| Prąd wyjściowy z napędu stopniowego |
0.07
|
-
|
1.15
|
A ((RMS)
|
| Podział napędowy stopniowy |
16
|
16
|
16
|
|
Specyfikacja
| - Nie, nie. |
Specyfikacja
|
UWC3500
|
| 1 |
Zaopatrzenie w moc
|
DC24V@2A wejście, wyjście DC12V@2A ((podanie mocy CCD)
|
| 2 |
Pomiar zgodności oprogramowania
|
Całkowicie kompatybilny z V1.4
|
| 3 |
Wymiar
|
255 * 118 * 53 mm)
|
| 4 |
Komunikacja
|
Wyposażenie w układzie USB lub ethernet (opcjonalne)
|
| 5 |
polityka kontroli zamkniętej pętli
|
PID+VFF+ martwy pas
|
| 6 |
Częstotliwość serwoodświetlenia
|
2.5KHz
|
| 7 |
Wstrząs przeciwmechaniczny, optymalizacja prędkości
|
Tryb SMART
|
|
| 8 |
Oś liczenia przekładników liniowych
|
3
|
|
| 9 |
Podstawowa oś sterowania
|
4
|
|
| 10 |
Koszty osi
|
Możliwość dodawania impulsu 3 osi + kierunku
|
|
| 11 |
Tryb sterowania osi XYZ
|
Impuls + kierunek RS422
|
|
| 12 |
Rodzaj silników wspieranych ośmią XYZ (z zewnętrznym silnikiem napędowym)
|
Serwo stopniowe/przechodzące/serwo liniowe/serwo prądu stałego z odwrotnym wpływem kodera
|
|
| 13 |
Tryb sterowania oś U A
|
Połączenie RS232 z obiektywem automatycznego zoomu Pomeas
|
|
| 14 |
Tryb sterowania oś U B
|
Wbudowany jest sterownik stopniowy 2 fazy, który obsługuje obiektyw do automatycznego powiększania z silnikami stopniowymi, obsługiwane są ograniczenia pojedyncze / duetowe.
|
|
| 15 |
Planowanie krzywej prędkości
|
Rodzaj drabiny/S
|
|
| 16 |
Interpolacja
|
Interpolacja liniowa wieloosiowa, interpolacja łukowa 2-osiowa, interpolacja 3-osiowa
|
| 17 |
Maksymalna częstotliwość pulsu
|
5MHz
|
|
| 18 |
Rozdzielczość częstotliwości impulsu
|
0.001Hz
|
|
| 19 |
Poziom regulacji prędkości
|
1,000,000,000
|
|
| 20 |
Analogiczne sterowanie napięciem
|
-
|
|
| 21 |
Częstotliwość liczenia przełącznika liniowego
|
6MHz/(faza A lub B)
|
|
| 22 |
Definicja sygnału przekształcacza liniowego
|
R lub S dla opcjonalnych (R:12345, S:26789)
|
|
| 23 |
Sprzęt pomiarowy sondy
|
Obwód interfejsu sondy dotykowej
|
|
| 24 |
Obwód przetwarzania błędów sondy
|
Dostępny, automatyczna naprawa sondy nonhoming
|
|
| 25 |
Kompatybilna sonda
|
RENISHAW/Tesa wszystkie serii sondy dotykowej
|
|
| 26 |
Moduł przetwarzania sondy
|
Złatanie sondy z dużą prędkością, punkt dotykowy sterowania joystickem, automatyczna pauza i automatyczne cofanie, tryb automatycznego wykrywania punktu
|
|
| 27 |
Wbudowana karta zbierania sygnału joystick
|
12 bitów rozdzielczości, analogiczne wprowadzenie napięcia 0-5V, 3 przyciski i 3 diody LED, włącza się przełącznik awaryjnego zatrzymania, włącza się przycisk regulacji prędkości (wzajemnie wykluczający się przycisk 3#)
|
|
| 28 |
Wbudowana karta sterująca oświetleniem
|
Światło powierzchniowe sekcji 8 + światło dolne + światło koaksjalne, programowe regulacje poziomu 0-200
|
|
| 29 |
Funkcja ustawiania stopnia oświetlenia
|
16 poziomów dostosowania sprzętowego w ustawieniu parametrów w oparciu o wymóg jasności
|
|
| 30 |
możliwość sterowania światłem konturowym / sterowanie bankami LED
|
Max. 420mA, nadaje się do większości dużych maszyn podróży
|
|
| 31 |
Zewnętrzny skomplikowany typ interfejsu oświetleniowego
|
Możliwość podłączenia do 5 pierścieni 8 sekcji jednobarwnego światła programowalnego lub 5 pierścieni 8 sekcji 4 kolorowego światła programowalnego, podwyższonego / obracanego światła
|
|
| 32 |
Ogólny interfejs I/O
|
8 sekcji wchodzących izolowanych, 5 wychodzących (kompatybilne z ULN2803)
|
|
| 33 |
Zegar systemu
|
Rok-miesiąc-dzień-godzinę-minutę-sekundę, nie można zmienić
|
|
| 34 |
Uaktualnienie oprogramowania
|
Uaktualnienie klienta na miejscu, zapewniające szybkie rozwiązanie i aktualizację techniczną.
|
|
| 35 |
Złącze sondy
|
9-pin D-DUB, łatwiejszy do podłączenia i bardziej stabilny
|
|
| 36 |
Złącze do joystiku
|
OTP6, OTP7, HC3 ((Joystick z wieloma klawiszami)
|
|
| 37 |
Przetwarzanie danych joystick
|
Kontroler wewnętrznie przetwarza dane joystick i sterowanie ruchem, wzajemne z innym trybem sterowania ruchem, joystick sondy dotykające z automatycznego zatrzymania i automatycznego wycofania
|
|
| 38 |
Zewnętrzne zatrzymanie awaryjne
|
Przycisk awaryjnego zatrzymania steruje zasilaczem silnika
|
|
| 39 |
Planowanie krzywej prędkości
|
Typowa drabina / S
|
|
| 40 |
Przełącznik limitu oprogramowania
|
Dostępne
|
|
| 41 |
Punkt opóźnienia oprogramowania
|
Dostępne
|
|
| 42 |
Wyznaczona odległość hamowania
|
Dostępne
|
|
| 43 |
Wspierane oprogramowanie do debugowania
|
wersja V4.0 lub nowsza (automatyczne wykrywanie i ustawianie parametrów)
|
|

 Twoja wiadomość musi mieć od 20 do 3000 znaków!
Twoja wiadomość musi mieć od 20 do 3000 znaków!